
Page 175 -
P. 175
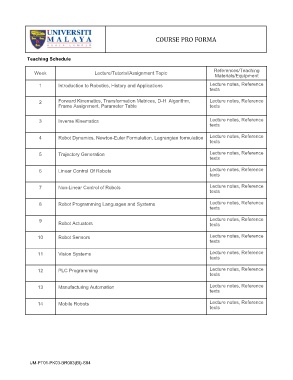
COURSE PRO FORMA
Teaching Schedule
References/Teaching
Week Lecture/Tutorial/Assignment Topic
Materials/Equipment
1 Introduction to Robotics, History and Applications Lecture notes, Reference
texts
2 Forward Kinematics, Transformation Matrices, D-H Algorithm, Lecture notes, Reference
Frame Assignment, Parameter Table
texts
3 Inverse Kinematics Lecture notes, Reference
texts
4 Robot Dynamics, Newton-Euler Formulation, Lagrangian formulation Lecture notes, Reference
texts
5 Trajectory Generation Lecture notes, Reference
texts
6 Linear Control Of Robots Lecture notes, Reference
texts
7 Non-Linear Control of Robots Lecture notes, Reference
texts
8 Robot Programming Languages and Systems Lecture notes, Reference
texts
9 Robot Actuators Lecture notes, Reference
texts
10 Robot Sensors Lecture notes, Reference
texts
11 Vision Systems Lecture notes, Reference
texts
12 PLC Programming Lecture notes, Reference
texts
13 Manufacturing Automation Lecture notes, Reference
texts
14 Mobile Robots Lecture notes, Reference
texts
UM-PT01-PK03-BR003(BI)-S04